Rover je letni softver zamijenio onim primjerenijim za kretanje po površini Marsa. Pomoći će mu pri savladavanju prepreka i obavljanju znanstvenih istraživanja
NASA-in rover Curiosity duži vikend na Marsu je proveo u svojevrsnom odmoru od znanstvenih aktivnosti tijekom kojeg se odvijala nadogradnja softvera.
U petak je počelo četverodnevno 'presađivanje mozga', kako su nadogradnju nazvali u svemirskoj agenciji, kojim će zamijeniti letni softver korišten za spuštanje, novim, primjerenim za roverove operacije na površini Marsa.
'Od početka smo zamislili da softver bude nadogradiv prema potrebama različitih faza misije', kaže Ben Cichy, glavni softverski inženjer misije. 'Letna verzija softvera koju je Curiosity koristio je bila namijenjena slijetanju. Ona uključuje mnogo mogućnosti koje više nisu potrebne. Dala nam je osnovne mogućnosti za djelovanje rovera na površini, ali od početka smo planirali prelazak na novi softver koji je optimiziran za površinske operacije.'
Novi softver je uploadan u roverovu memoriju tijekom leta prema Marsu, ali zbog hardverskih ograničenja nije ga bilo moguće instalirati.
Roverov 'mozak' se sastoji od dva BAE RAD 750 procesora na 200 MHz (verzija IBM PowerPC 750 otporna na radijaciju), 256 MB RAM-a i 2 GB flash memorije. Većina današnjih pametnih telefona ima više procesorske snage i memorije, pa se mnogi pitaju zašto u Curiosity nije ugrađeno nešto bolje.
Odgovor je jednostavan: elektroničke komponente moraju biti otporne na uvjete koji vladaju u svemiru (radijacija, ogromne temperaturne razlike) te pomno ispitane i dokazane funkcionalnosti u tim ekstremnim uvjetima. Ta vrsta procesora je već bila korištena 2005. godine u misijama Deep Impact, XSS-11 i Mars Reconnaissance Orbiter te su tako potvrdili svoju izdržljivost i upotrebljivost.
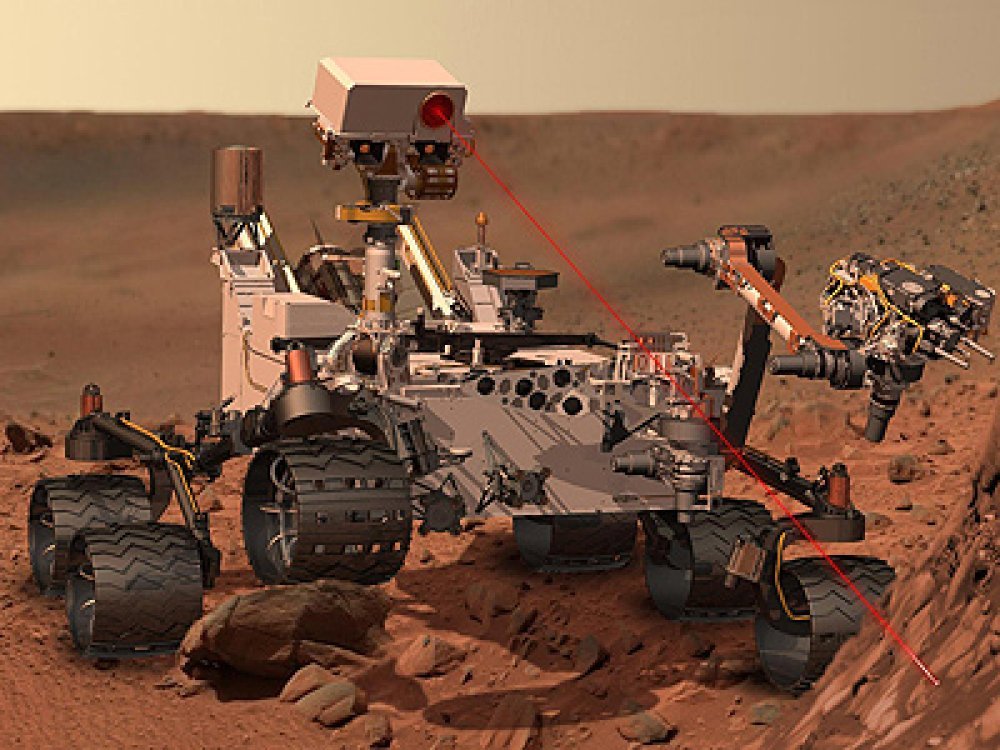
Nakon završetka testiranja funkcionalnosti, novi softver će Curiosityju omogućiti punu kontrolu moćne robotske ruke, lasera i bušilice te napredno procesiranje slike potrebno za kontrolu i prepoznavanje prepreka u vožnji. Budući da nije moguća kontrola rovera u stvarnom vremenu, njegovo duže samostalno kretanje površinom Marsa ovisi o uspješnom izbjegavanju potencijalnih prepreka i opasnosti, pa će taj dio softverskog koda biti jedan od ključnih elemenata za uspješnost misije.
Tokom nadogradnje i testiranja podsistema roverove aktivnosti su potpuno obustavljene, a tijekom tog vremena znanstvenici NASA-e proučavaju prije prikupljene slike te planiraju aktivnosti koje slijede nakon roverovog 'odmora'.